While developing the device software for 454 Bio’s DNA sequencer, I needed to be able to build rpicam-apps and our HAL. While I could compile directly on the Pi 4 it was running on, it was quite slow:
aarmea@raspberrypi:~/Code/tirf-hal/builddir $ meson compile --clean && time meson compile
Cleaning... 0 files.
[70/70] Linking target apps/capture-service
real 4m12.382s
user 14m38.012s
sys 1m8.128s
Instead, I set up my much faster M1 Mac to cross-compile this and our custom code, which is almost 10x faster and allowed me to iterate much more quickly:1
debian@debian:~/Code/454-hal/builddir$ meson compile --clean && time meson compile
Cleaning... 0 files.
[70/70] Linking target apps/capture-service
real 0m32.847s
user 1m46.109s
sys 0m14.082s
Because the environment is virtualized, it was much easier to set up and integrate Pi-specific libraries than with other cross-compilation toolchains.
tl;dr
In a nutshell, we’ll be doing the following:
- Create an equivalent
aarch64Debian VM - Install application-specific dependencies in it, including packages exclusive to Raspbian
- Compile as usual (but faster)
Initial setup
This is possible for a few reasons:
- Raspbian is derived from Debian
- Raspberry Pi 3 and newer and Raspberry Pi Zero 2 and newer use 64-bit ARM processors
- Raspbian is available as a 64-bit build2
- Apple silicon processors are also 64-bit ARM
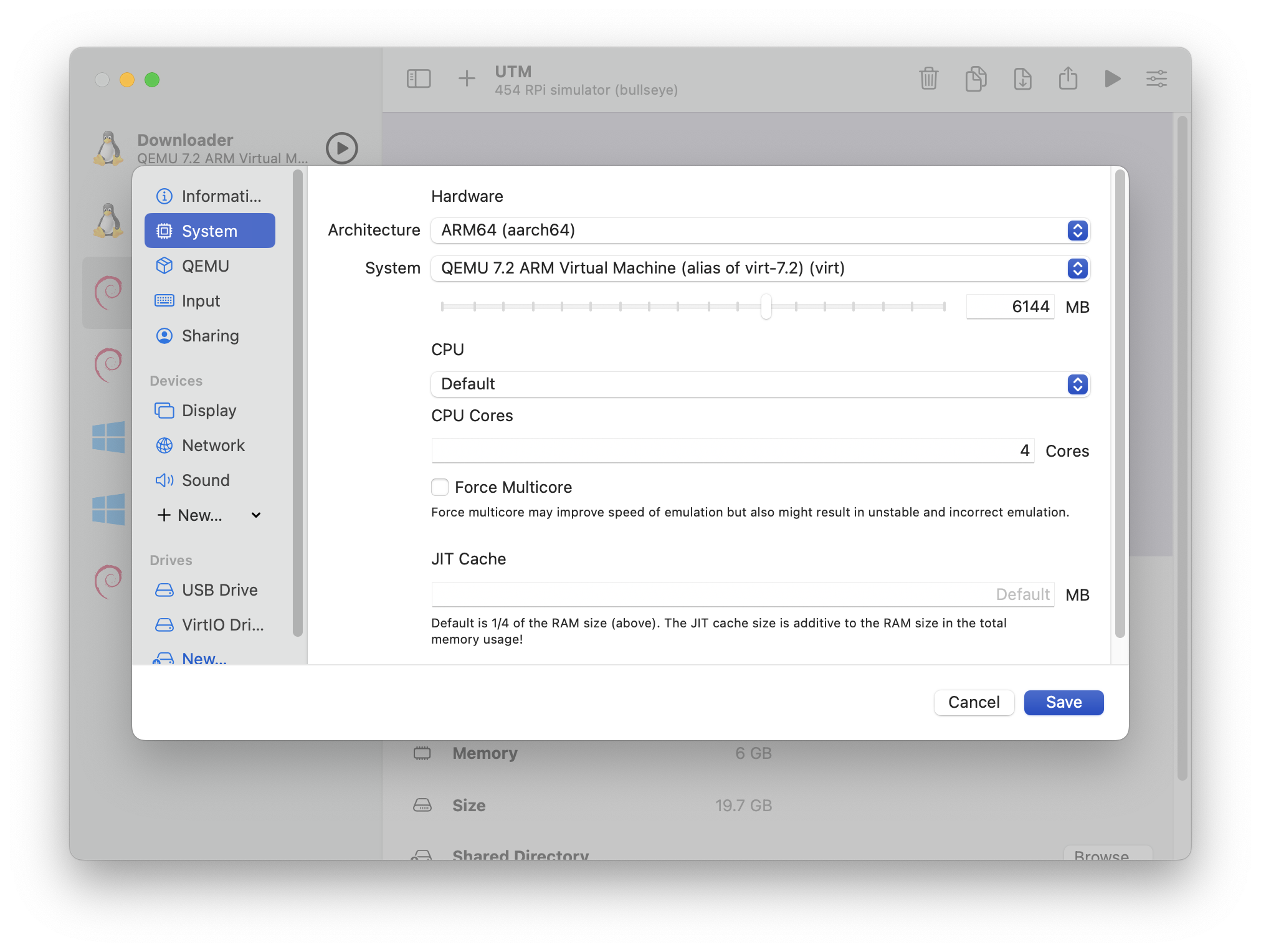
To get started, first install a virtualization platform on your Mac. I recommend the free and open-source UTM, which also offers prebuilt Debian images.
After installing UTM, install the version of Debian that corresponds to the version installed on your Pi. The rest of this guide assumes 64-bit Bullseye, but Bookworm should work as well.
Adjust the VM’s settings before booting up. 4 cores with 6 GB of RAM was a good balance on my MacBook Pro with 16 GB of RAM.3
Then, boot up the VM and open up the terminal to do some basic housekeeping:
# Initial setup
sudo apt update
sudo apt upgrade
# Convenience packages
sudo apt install htop tmux mosh git build-essential rsync
Better integration via “remote” access
If you’re comfortable working inside the VM’s GUI, feel free to skip this section. If not, you can access the VM over SSH.
First, retrieve the VM’s IP address on UTM’s shared interface:
debian@debian:~$ ip addr
1: lo: <LOOPBACK,UP,LOWER_UP> mtu 65536 qdisc noqueue state UNKNOWN group default qlen 1000
link/loopback 00:00:00:00:00:00 brd 00:00:00:00:00:00
inet 127.0.0.1/8 scope host lo
valid_lft forever preferred_lft forever
inet6 ::1/128 scope host
valid_lft forever preferred_lft forever
2: enp0s1: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc pfifo_fast state UP group default qlen 1000
link/ether 3c:13:d6:23:10:f5 brd ff:ff:ff:ff:ff:ff
inet 192.168.64.4/24 brd 192.168.64.255 scope global enp0s1
valid_lft forever preferred_lft forever
...
In my case, the relevant interface is enp0s1 and the private IP address is 192.168.64.4. This is static and can be entered in to your Mac’s SSH config at ~/.ssh/config:
aarmea@Alberts-MacBook-Pro x-compile-pi-arm-mac % cat ~/.ssh/config
Host *
AddKeysToAgent yes
UseKeychain yes
Host pi-vm
HostName 192.168.64.4
User debian
Then, use ssh-copy-id pi-vm to use your SSH keys to log into the VM and bypass the password prompt every time.
With that complete, you can now directly ssh pi-vm and use related tools, like scp and rclone, and even connect to it using Visual Studio Code.
Installing application-specific packages
I particularly needed to be able to build rpicam-apps, so I then installed the subset of its dependencies that were common to both Debian and Raspbian:
sudo apt install -y python3-pip
sudo apt install -y libepoxy-dev libjpeg-dev libtiff5-dev
sudo apt install -y qtbase5-dev libqt5core5a libqt5gui5 libqt5widgets5
sudo apt install -y libavcodec-dev libavdevice-dev libavformat-dev libswresample-dev
sudo apt install -y cmake libboost-program-options-dev libdrm-dev libexif-dev
sudo apt install -y libboost-dev
sudo apt install -y libgnutls28-dev openssl libtiff5-dev
sudo apt install -y qtbase5-dev libqt5core5a libqt5gui5 libqt5widgets5
sudo apt install -y meson
sudo apt install -y libglib2.0-dev libgstreamer-plugins-base1.0-dev
sudo apt install -y libpng-dev
sudo pip3 install jinja2
sudo pip3 install pyyaml ply
sudo pip3 install --upgrade meson
Installing Pi-only packages in the VM
In my case, 454’s HAL requires libcamera-dev and libcamera0 to use the camera and libpigpio1 and libpigpio-dev for GPIO.
The Pi-specific packages are a little trickier as they are not directly available from the Debian repositories. If you try to install one directly, you’ll see an error like this:
debian@debian:~$ sudo apt install libpigpio1
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
E: Unable to locate package libpigpio1
Instead, these will have to be downloaded manually from the relevant Pi repository and installed manually4 using dpkg. Manually copying packages forces you to think about the dependency tree, which is very important across distributions. If you’re not careful, you could end up breaking your VM by installing an incompatible glibc or similar.
If you know what you’re doing, you might be able to get away with using add-apt-repository on the VM with the Pi repository at http://archive.raspberrypi.org/debian.
Obtain the URL
On the Pi, run apt-cache show $PACKAGE_NAME and look for the line that begins with Filename:
aarmea@raspberrypi:~ $ apt-cache show libcamera-dev
Package: libcamera-dev
Source: libcamera
Version: 0~git20230720+bde9b04f-1
Architecture: arm64
Maintainer: Debian Multimedia Maintainers <[email protected]>
Installed-Size: 138
Depends: libcamera0 (= 0~git20230720+bde9b04f-1)
Multi-Arch: same
Homepage: https://libcamera.org/
Priority: optional
Section: libdevel
Filename: pool/main/libc/libcamera/libcamera-dev_0~git20230720+bde9b04f-1_arm64.deb
Size: 24388
SHA256: 50f4043be060f0dea24e4aa70ea8e6a0ce3e65cd4bd074ed296c33d0304db983
SHA1: 7939d7515b72741448251f0d6dcdb18c51300dfe
MD5sum: 87016da23324afd025c12a0d7b89a9eb
Description: complex camera support library (development files)
libcamera is a complex camera support library which handles low-level
control of the camera devices, providing a unified higher-level
programming interface to the applications.
.
This package provides the necessary files needed for development
Description-md5: a817fddde055009800fbb7c2566de922
Append this line to the Pi repository root and you’ll get a URL like the following:
Download and install the package
Back on the VM, download the package using wget with this URL, and install it using dpkg:
debian@debian:~/Downloads $ wget http://archive.raspberrypi.org/debian/pool/main/libc/libcamera/libcamera-dev_0~git20230720+bde9b04f-1_arm64.deb
--2024-03-02 09:17:08-- http://archive.raspberrypi.org/debian/pool/main/libc/libcamera/libcamera-dev_0~git20230720+bde9b04f-1_arm64.deb
...
2024-03-02 09:17:08 (213 KB/s) - ‘libcamera-dev_0~git20230720+bde9b04f-1_arm64.deb’ saved [24388/24388]
debian@debian:~/Downloads$ sudo dpkg -i libcamera-dev_0~git20230720+bde9b04f-1_arm64.deb
Selecting previously unselected package libcamera-dev:arm64.
(Reading database ... 105377 files and directories currently installed.)
Preparing to unpack libcamera-dev_0~git20230720+bde9b04f-1_arm64.deb ...
Unpacking libcamera-dev:arm64 (0~git20230720+bde9b04f-1) ...
dpkg: dependency problems prevent configuration of libcamera-dev:arm64:
libcamera-dev:arm64 depends on libcamera0 (= 0~git20230720+bde9b04f-1); however:
Package libcamera0 is not installed.
dpkg: error processing package libcamera-dev:arm64 (--install):
dependency problems - leaving unconfigured
Errors were encountered while processing:
libcamera-dev:arm64
As you run, make note of dpkg errors of the form “Package … is not installed”. If that package is not in your list of packages to install and you don’t suspect it will cause issues, add it to your list and keep going.
Validate
Once you believe you have installed all of the Pi-specific packages for your application, ensure that APT is in a consistent state by running sudo apt install -f. If it only attempts to install packages from the Debian repository, allow it and you are good to go.
Be careful: if it instead tries to remove packages…
debian@debian:~/Downloads$ sudo apt install -f
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
Correcting dependencies... Done
The following packages will be REMOVED:
libcamera-dev
0 upgraded, 0 newly installed, 1 to remove and 0 not upgraded.
1 not fully installed or removed.
After this operation, 141 kB disk space will be freed.
Do you want to continue? [Y/n] n
Abort.
… you are likely missing a package from the Pi repository, and proceeding will undo some of your work. Double-check that all of the packages and their dependencies are installed before re-running. Tools like aptitude, run on both the Pi and VM, may make it easier to identify the missing packages.
For what it’s worth, the full list of packages that tirf-hal requires from the Pi repository is:
libcamera-devlibcamera0libpigpio1libpigpio-devraspberrypi-kernel– note that simply installing the kernel does not configure GRUB to boot from it by default. I haven’t tested booting the Pi kernel in the VM and also don’t recommend it.
Compiling
I patterned tirf-hal around rpicam-apps so I could directly reference its headers in my code. As a result, it also uses meson as its build system and all of the normal commands work after cloning the repository:
debian@debian:~/Code $ git clone [email protected]:454bio/tirf-hal.git
Cloning into 'tirf-hal'...
...
debian@debian:~/Code $ cd tirf-hal/
debian@debian:~/Code/tirf-hal $ git submodule update --init --recursive
...
Submodule path 'subprojects/rpicam-apps': checked out '7e4d3d71867f60f5398687180972798baad85f1b'
debian@debian:~/Code/tirf-hal $ meson setup builddir
The Meson build system
Version: 1.3.2
Source dir: /home/debian/Code/tirf-hal
Build dir: /home/debian/Code/tirf-hal/builddir
...
Build targets in project: 14
libcamera-apps 1.2.1
libcamera
location : /usr/lib/aarch64-linux-gnu
version : 0.0.5
Build configuration
libav encoder : YES
drm preview : YES
egl preview : YES
qt preview : YES
OpenCV postprocessing: NO
TFLite postprocessing: NO
454-hal 7
Subprojects
rpicam-apps: YES
Found ninja-1.10.1 at /usr/bin/ninja
debian@debian:~/Code/tirf-hal $ cd builddir
debian@debian:~/Code/tirf-hal/builddir $ meson compile
[70/70] Linking target apps/capture-service
Deploying to the Pi
The final step is to deploy the compiled binaries to the Pi. I like to use rsync for this so I can easily and efficiently copy everything to the Pi over the network:
debian@debian:~/Code/tirf-hal/builddir$ rsync -avzdP ./ root@$YOUR_PI_HOSTNAME:/454/hal/
...
Then you can run your code:
aarmea@raspberrypi:/454/hal/ $ ./apps/capture-service
Usage:
./apps/capture-service ...
-
I know a clean build is a little contrived here, but it really adds up. This is the difference between an incremental build taking a few seconds versus a minute or more. ↩︎
-
If your Pi is running a 32-bit operating system, I highly recommend upgrading to 64-bit instead. Support for 32-bit builds is outside of the scope of this article as it will require either using an emulated VM (much slower) or installing a proper cross-compilation environment inside a 64-bit VM (more complicated). ↩︎
-
“Force Multicore” doesn’t make a difference in this scenario because UTM is using Apple’s hypervisor for the processor rather than emulating via QEMU. ↩︎
-
Normally, installing packages compiled for a different Linux distribution is a Bad Idea™. In this case, Raspbian and Debian are both very closely related and stable (i.e. slow to update but also slow to break things) distributions. ↩︎